The visualization shows the real-time PPP user performance in Toulouse, France, improved using NAVCAST clock and orbit corrections and code and phase biases for enhanced accuracy. Observations are retrieved in real time from the International GNSS Service (IGS).
GPS Clock and Ephemeris Corrections
So accurate, and so fast!
NAVCAST converges to centimeter accuracy in minutes. We have measured convergence time using clock and orbit corrections only for kinematic NAVCAST users forcing hourly restarts. Shorter convergence times are expected when using phase and code bias. The table shows the percentage of users converged to an accuracy of 20cm:

How good are NAVCAST clocks and orbits?
NAVCAST Galileo and GPS precise orbits and clocks have been compared to two IGS multi-GNSS (CODE and GFZ) centres over a one week period.
Tests were conducted in a fully realistic testing environment of the unmodified clock estimation software in real-time using 90 stations worldwide. Pre-stored observation data from all stations were used for generation of high-quality orbit solutions, 3-day arcs were processed and the central days were used for the assessment. GPS and Galileo orbits determined from the same network were also used as input for clock estimation.
Reference Stations used to generate R/T corrections

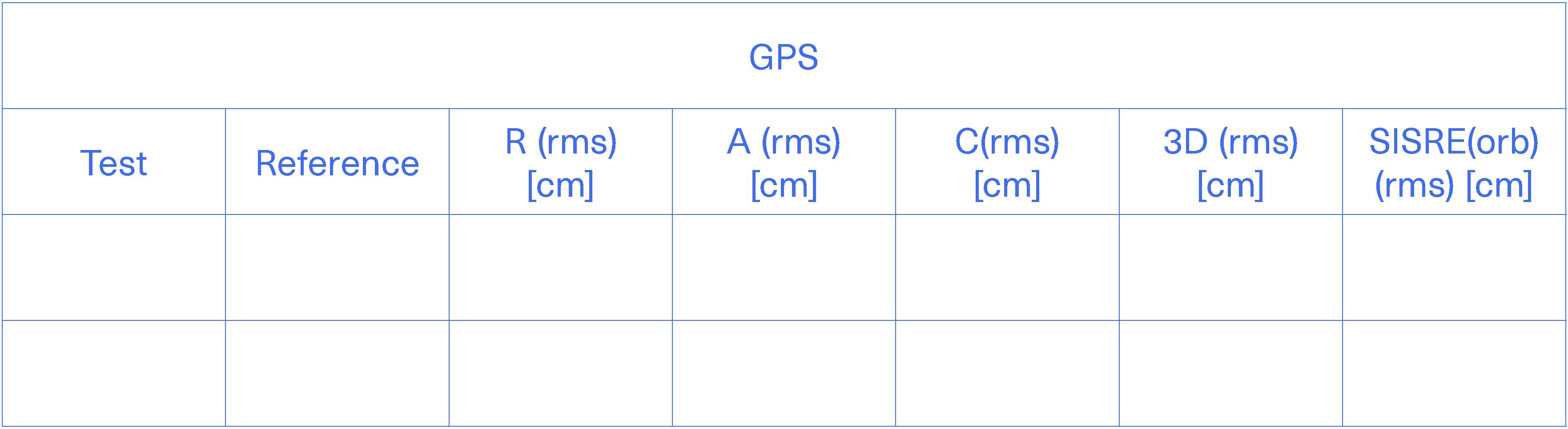
Orbit Accuracy, each millimetre counts!
We show the root-mean-square (RMS) orbit differences in radial (R), along-track (A) and cross-track (C) directions, the 3D errors direction and the “orbit-only-signal-in space range error” SISRE(orb).
SISRE(orb) constitutes a commonly acknowledged metric for orbit accuracy assessment and can directly be used to assess the impact of GNSS orbit errors on the user positioning performance.
We compared the benchmark NAVCAST orbit against two IGS multi-GNSS (CODE,GFZ) orbit products. Results show NAVCAST orbit determination accuracy is below 5cm RMS for individual components (R,A,C), 3D and the SISRE(orb):

Clock Accuracy, just wait a nanosecond …
For clock accuracy evaluation, we decided to follow the common practice of IGS clock product comparisons, to remove an epoch-wise constellation-mean clock difference and satellite specific clock biases. Here we also show the geographically averaged signal-in-space range error (SISRE) as a more appropriate performance measure than the actual clock difference (ΔClk).
We compared the benchmark NAVCAST clock against two IGS multi-GNSS (CODE, GFZ) clock products. Results show NAVCAST clock estimation accuracy is below 0.2ns RMS for ΔClk and the SISRE:

Don’t stop the clock!
NAVCAST is fast. The latency on clock estimation is key for a real time service as NAVCAST. We have measured the time RETICLE needs to output a clock estimate depending on the number of stations. Results are below 1 second for a 90 stations network.